77GHz数字型模拟器(2G带宽)
77GHz数字型模拟器(2G带宽)

产品型号:RTS7681DC-20-12-EH-A
工作频段:76GHz ~ 81GHz
瞬时带宽:2GHz
距离范围:0~1000m
距离步进:0.06m
速度范围:-600~600km/h
速度步进:0.002m/s
功率范围:126dBm
功率步进:0.5dB
模拟目标个数:1~2个
1. 产品功能
汽车雷达目标模拟器(Radar Target Simulator——RTS),以下简称RTS,在雷达的研发和应用阶段,可以对毫米波雷达进行道路场景的回波模拟。在雷达的生产阶段,RTS是雷达产线终检系统(End of Line——EOL)的重要组成部分。另外,RTS也是ADAS雷达硬件在环(Hardware In Loop——HIL)仿真系统的重要组成部分。
2. 工作原理
RTS工作原理示意如下图所示,RTS接收雷达发射信号后,经过下变频,在FPGA中完成用户设置的场景目标信息调制,再上变频后通过阵列天线发射给雷达,雷达就会感知到用户设置的目标场景。
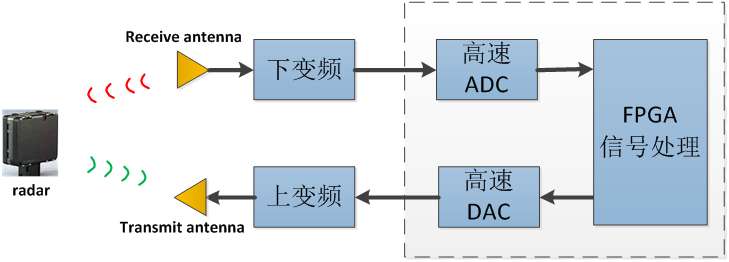
图 5 RTS工作原理图
3. 产品优势
目前大多数RTS产品采用数字FPGA组合光纤延迟线方案,对于远距离目标的模拟采用数字FPGA方案,近距离目标的模拟采用光纤延迟线方案,光纤方案的缺点在于对于多个目标的模拟需要采用多套光纤延迟系统,导致RTS成本与目标个数成正比关系。
我们的RTS产品采用全数字FPGA技术,可以同时模拟多个角度的目标,并且每个目标的最近距离理论上可以到零米。我们的RTS产品具有角度模拟灵活、性能卓越、对外接口开放、软件界面友好、用户体验感强、成本较低等优点,是汽车毫米波雷达研发和生产测试的最佳选择。
4. 适用范围
几乎当前所有的汽车雷达都是采用相位或者频率进行距离测量,这些雷达发射的波形包括:FSK、MFSK、Fast Chirp Sequence,以及这些波形的组合波形,我们的RTS对这些雷达都是适应的。
5. 应用领域
汽车雷达,无人机雷达,交通雷达,以及工作在24GHz与77GHz的其他雷达。
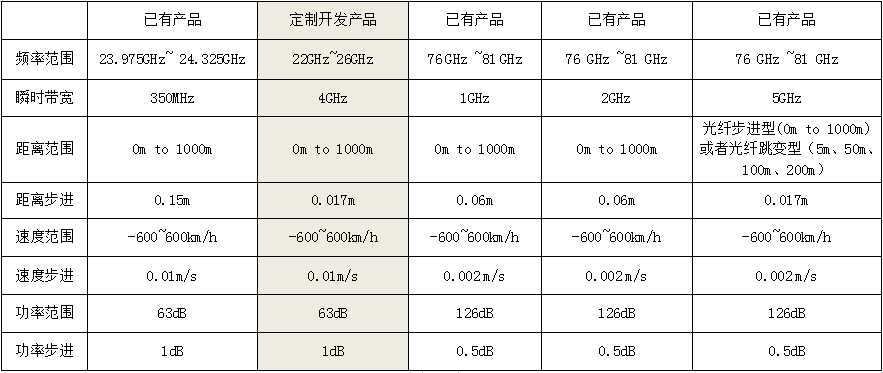
6. 技术指标
7. 产品规格
我们的RTS产品根据工作频率、带宽以及多目标的角度模拟能力分成多种型号供用户进行选择。产品型号标识说明如下图所示:
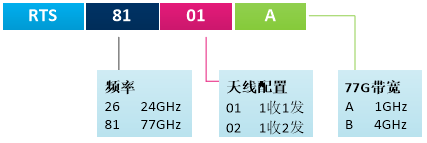
图 1 产品型号标识
所有RTS产品的参数配置如下表所示: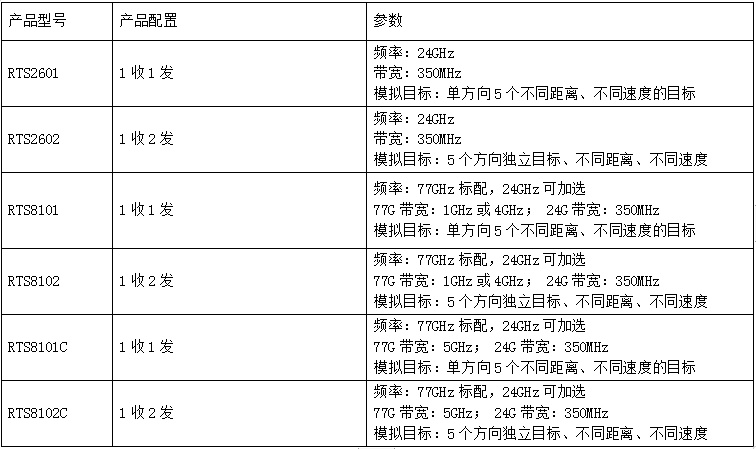
8. 功能介绍
8.1 示波器功能
显示雷达发射信号的幅度-时间图。计算雷达的EIRP。

图 2时域图界面
8.2 频谱仪功能
显示雷达发射信号的频率-时间图。具有时频波形数据存储功能。
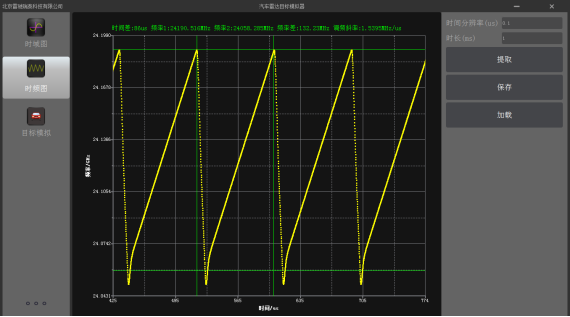
图 3时频波形图
8.3 目标场景模拟功能
用户根据界面设置多目标场景信息对雷达进行场景模拟,界面提供场景模拟的动态演示效果。
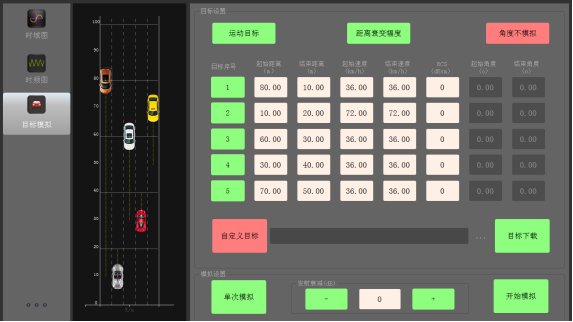
图 4目标模拟软件
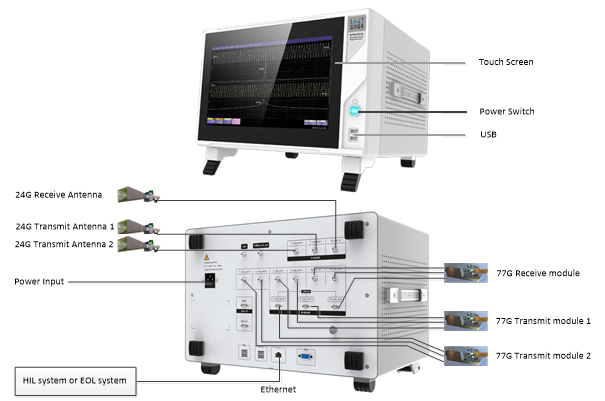
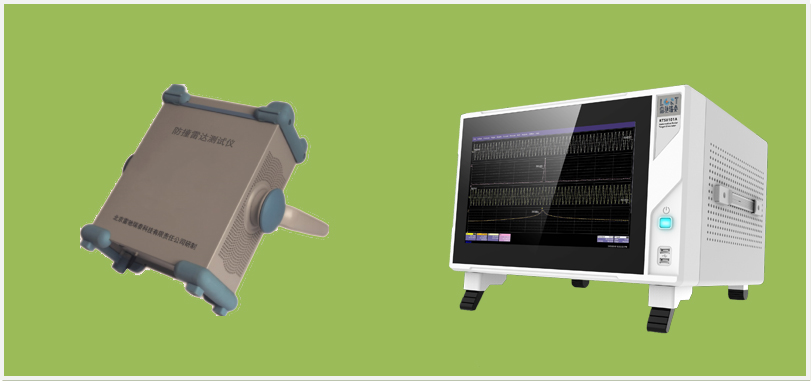
9. 产品外观与对外接口
9.1 RTS2601/2602
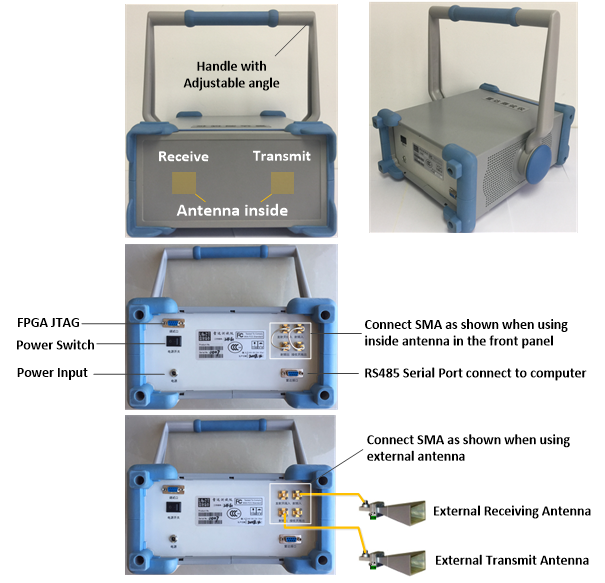
9.2 RTS81XX产品